ORIGINAL
Diseño e implementación de un agitador orbital a bajo costo para laboratorios
Design and implementation of a low-cost orbital shaker for laboratories
Ernesto Díaz-Ronceros1 ![]() *,
Ángel David Hernández-Amasifuen2
*,
Ángel David Hernández-Amasifuen2 ![]() *,
William Joel Marín-Rodriguez1,3
*,
William Joel Marín-Rodriguez1,3 ![]() *,
Daniel Andrade Girón1
*,
Daniel Andrade Girón1 ![]() *,
José Luis Ausejo-Sánchez1,3
*,
José Luis Ausejo-Sánchez1,3 ![]() *,
Algemiro Julio Muñoz-Vilela1
*,
Algemiro Julio Muñoz-Vilela1 ![]() *,
Abrahán Cesar Neri-Ayala1,3
*,
Abrahán Cesar Neri-Ayala1,3 ![]() *
*
1Universidad Nacional José Faustino Sánchez Carrión. Lima. Huacho, Perú.
2Universidad Nacional Agraria La Molina, Programa Doctoral en Ciencias e Ingeniería Biológicas, Lima, Perú.
3Universidad Tecnológica del Perú. Lima, Perú.
Citar como: Díaz-Ronceros E, Hernández-Amasifuen Ángel D, Marín-Rodriguez WJ, Andrade Girón D, Ausejo-Sánchez JL, Muñoz-Vilela AJ, Neri-Ayala AC. Diseño e implementación de un agitador orbital a bajo costo para laboratorios. Salud, Ciencia y Tecnología. 2023;3:397. https://doi.org/10.56294/saludcyt2023397
Recibido: 02-04-2023 Revisado: 19-04-2023 Aceptado: 27-05-2023 Publicado: 28-05-2023
Editor: Lic.
Mabel Cecilia Bonardi ![]()
RESUMEN
Los agitadores orbitales son de gran importancia en los laboratorios de cultivo vegetal, sin embargo, el costo elevado de estos equipos muchas veces imposibilita que los investigadores los puedan adquirir. Por lo tanto, el objetivo del estudio fue diseñar e implementar un agitador orbital a bajo costo para laboratorios de cultivo vegetal. El tipo de investigación fue aplicado y experimental. Como resultados se obtuvo el diseño impreso en 3D de la estructura de soporte, así como el sistema de control basado en un microcontrolador ATmega328P. El rango de las revoluciones por minuto del agitador orbital estuvo comprendido entre 0 y 350rpm. Se concluye que el agitador orbital cumple con el objetivo planteado en la presente investigación, obteniendo un costo de implementación de USD 153,50 dólares americanos.
Palabras clave: Agitador Orbital; Microcontrolador Atmega328p; Impresión 3D.
ABSTRACT
Orbital shakers are of great importance in plant culture laboratories, however, the high cost of this equipment often makes it impossible for researchers to acquire them. Therefore, the objective of the study was to design and implement a low-cost orbital shaker for plant culture laboratories. The type of research was applied and experimental. As results, the 3D printed design of the support structure was obtained, as well as the control system based on an ATmega328P microcontroller. The range of the revolutions per minute of the orbital shaker was between 0 and 350rpm. It is concluded that the orbital shaker meets the objective set out in this research, obtaining an implementation cost of USD 153,50 US dollars.
Keywords: Orbital Shaker; Atmega328p Microcontroller; 3D Printing.
INTRODUCCIÓN
En los laboratorios, los agitadores orbitales se utilizan para la mezcla homogénea de líquidos o para el cultivo de muestras en movimiento. Los agitadores orbitales generalmente vienen en tamaños de mesa pequeños, donde se sacude a temperaturas de laboratorio. Estos agitadores funcionan de manera comparable, pero tienen el producto en un ambiente cerrado e incubado mientras se agita.(1) Una aplicación específica del agitador orbital es agitar cultivos que crecen en vasos de precipitados en movimiento orbital constante que proporcionará el crecimiento controlado de los cultivos en el entorno interior de los vasos de precipitados. La agitación suave, circular y uniforme en una velocidad controlada es importante para mantener una tasa de crecimiento similar entre lotes de cultivo en diferentes contenedores. Los agitadores orbitales se han utilizado en diferentes áreas donde la agitación es necesaria, que van desde los medicamentos a la agricultura. El mecanismo de los agitadores orbitales consiste en un motor acoplado a una plataforma. La órbita está unida al motor y como el motor gira en un movimiento circular, la órbita sacude el contenido del recipiente. Toda la plataforma de un agitador orbital viaja en una órbita circular.(2,3)
Sería difícil imaginar laboratorios modernos sin equipos de agitación con control de temperatura, ya que son esenciales para facilitar la reacción entre distintas sustancias y el crecimiento de cultivos biológicos que no se producirían naturalmente debido a las condiciones particulares necesarias para su desarrollo. Por ejemplo, algunos microorganismos tienen un crecimiento mínimo, máximo u óptimo en función de su temperatura, y sin una adecuada agitación, no serían capaces de absorber el oxígeno necesario para su desarrollo.(4)
La utilización de oxígeno por parte de los microorganismos solo es posible cuando este se encuentra disuelto en el medio, lo que subraya la importancia de emplear agitadores en análisis que involucren microorganismos aeróbicos. Además, en determinadas condiciones, la agitación es necesaria para la fermentación microbiana, que se compone de tres fases: reacciones líquido-sólido, gas-sólido y gas-líquido.(4)
Actualmente, existen diversas compañías en la industria dedicadas a la fabricación de equipos de laboratorio, incluyendo los agitadores electromecánicos con movimiento orbital, que pueden contar con o sin control de temperatura. Estos equipos tienen especificaciones similares, pero pueden variar en precio dependiendo de la compañía y las funcionalidades del equipo. En promedio, el costo de estos equipos es superior a los 1000 dólares americanos.(4,5)
Por lo tanto, el objetivo de la presente investigación fue diseñar e implementar un agitador orbital a bajo costo para laboratorios.
MÉTODOS
Se desarrolló un estudio del tipo aplicado y experimental, porque se enfoca en el diseño e implementación del dispositivo agitador orbital, el cual su confiabilidad estará basada en las pruebas realizadas. Para llevar a cabo su implementación se emplearon las siguientes etapas: Impresión 3D de la estructura de soporte, diseño del sistema electrónico, programación de la tarjeta Arduino UNO, pruebas del agitador orbital a distintas revoluciones y el ensamblaje final del dispositivo.
La bibliografía empleada se enfoca en la investigación experimental, utilizando fuentes de bases de datos científicas con acceso digital, bibliotecas universitarias y revistas científicas que abordan los desafíos, retos y propuestas planteadas por los investigadores para el diseño de un agitador orbital.
RESULTADOS
Estructura en impresión 3D
Para el desarrollo de la estructura del agitador virtual (orbital shaker) se empleó la técnica de impresión 3D en una impresora Creality Ender 3 Pro, tal como se aprecia en la figura 1, luego se ensambló y sujeto mediante tornillos.
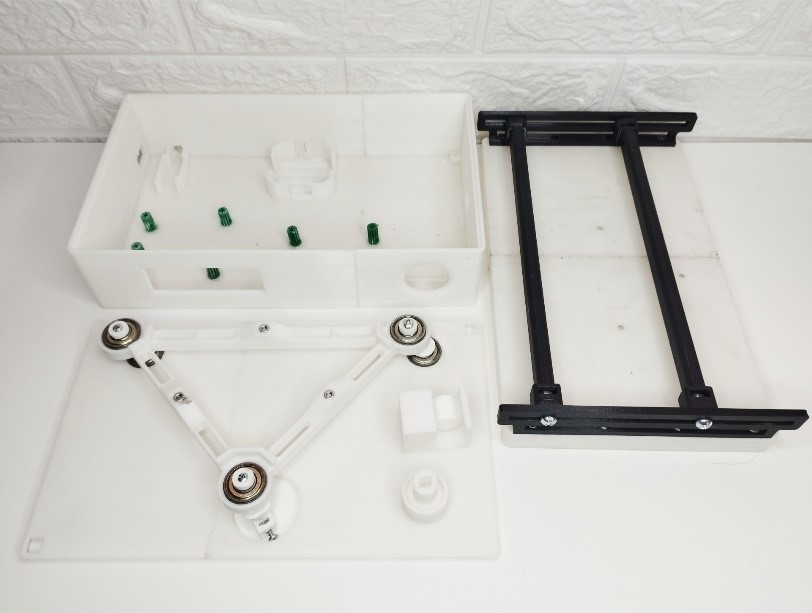
Figura 1. Estructura del agitador virtual con impresión 3D
Sistema Electrónico
En la parte interna se acondicionó su sistema electrónico (figura 2) compuesto por una tarjeta Arduino UNO, un motor paso a paso NEMA de 12VDC, un driver DRV8825, un potenciómetro de 5k, un capacitor de 100uf y una pantalla LCD 16x2.

Figura 2. Sistema electrónico interno del agitador orbital
Programación del Microcontrolador ATmega328P
La tarjeta Arduino UNO basada en un microcontrolador ATmega328P de la marca Atmel se encargó de adquirir la señal analógica del potenciómetro por su entrada periférica AN0, luego se procede a escalar la señal con una resolución de 10 bits para posteriormente mediante la librería #include <AccelStepper.h>. Para calcular las revoluciones se empleó el comando de escalamiento stepperMotorSpeed= map(potValue, 0, 1023, 0, 1000); y la fórmula RPM=(30*stepperMotorSpeed)/100. Finalmente envía la información al DRV8825 que se encarga de controlar el motor NEMA de 12VDC usando el comando stepper.setSpeed(stepperMotorSpeed).
Funcionamiento del Agitador Orbital
Para iniciar el funcionamiento del agitador orbital primero se debe conectar su fuente de alimentación en la parte posterior el cual consiste en un cargador de 12VDC 1.5A, luego la pantalla LCD se enciende mostrando un mensaje de bienvenida por unos segundos para posteriormente indicar el ajuste de los RPM (revoluciones por minuto) que se requiere asignar, para ello se cuenta con una perilla en la parte frontal derecha (figura 3). Después de seleccionar la velocidad se activa la alimentación del motor con el interruptor lateral izquierdo (figura 4) y para iniciar el movimiento rotacional se debe activar el interruptor lateral derecho (figura 4). El agitador orbital se mantendrá en movimiento indefinidamente hasta que el usuario o investigador decida detenerlo cambiando de modo del interruptor de movimiento, en este momento el usuario puede optar por variar la velocidad y dar nuevamente el inicio del movimiento o en su defecto desactivar la alimentación del motor NEMA y apagar el equipo.

Figura 3. Agitador orbital modo de ajuste de RPM

Figura 4. Agitador orbital vistas laterales
Rangos de las revoluciones por minuto (RPM)
Las revoluciones por minuto están relacionadas a la resolución de la señal analógica, el rango de los RPM está comprendidos desde 0 hasta 350rpm (figura 5).
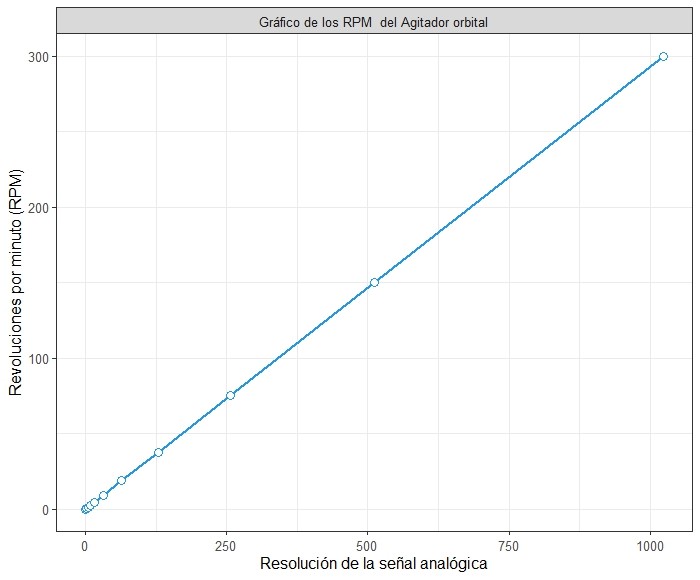
Figura 5. Rango de Revoluciones por Minuto (RPM)
Presupuesto
|
Tabla 1. Presupuesto del agitador orbital |
||
|
Costos |
Cantidad |
Precio |
|
Impresión 3D |
1 |
60,00 |
|
Motor paso a paso 12V NEMA 17 34mm |
1 |
23,00 |
|
Pololu DRV8825 driver |
1 |
5,00 |
|
Arduino Micro Pro, con espadines |
1 |
10,00 |
|
Rocker Switch |
1 |
0,50 |
|
DC Adaptador hembra |
1 |
0,50 |
|
Potenciómetro 10K |
1 |
1,00 |
|
I2C |
1 |
3,50 |
|
LCD 16X2 |
1 |
4,00 |
|
Cargador 12V 2A |
1 |
8,00 |
|
Espadines |
3 |
1,50 |
|
Flete |
3 |
20,00 |
|
Pololu DRV8825 driver |
1 |
6,50 |
|
Arduino UNO |
1 |
10,00 |
|
Costo Total |
|
USD 153,50 |
DISCUSIÓN
Los resultados demuestran que el dispositivo desarrollado cumple con la funcionabilidad que debe tener un agitador orbital (orbital shaker). En ese sentido coincidimos con Arboleda(2), quien menciona que después de la evaluación realizada, se llegó a la conclusión de que el agitador orbital económico era adecuado y viable. No obstante, durante la investigación se comprobó que un motor de corriente continua de bajo costo podría suministrar y regular el movimiento de agitación orbital sofisticad.
En otro sentido Panizo(4), menciona que luego de revisar el control de velocidad y el motor del prototipo y de implementar las recomendaciones necesarias, se llegó a la conclusión de que si se selecciona un motor cuyo consumo de corriente no exceda los 2 amperios y sea capaz de alcanzar una velocidad de 400 RPM o más a su torque nominal, se logrará una velocidad para el prototipo dentro del rango deseado de 40 a 400 RPM. Para el caso de la investigación de Espinoza(6), el rango de trabajo del Agitador Orbital Modular es de 20 a 120 (RPM) debido a las necesidades proporcionadas por el Laboratorio de Cultivos Vegetales; en nuestra investigación el rango obtenido para el agitador orbital fue de 0 a 300 RPM.
La capacidad de controlar la velocidad de agitación es crucial durante la realización de ensayos, y el uso de un motor a pasos permite un funcionamiento preciso y sencillo.(7) El control de los pulsos del motor es posible gracias a un controlador proporcional, lo que aumenta la precisión en la regulación de la velocidad.(8)
El presupuesto de nuestro agitador virtual fue de USD 153,50 dólares americanos, siendo un monto económico a diferencia los equipos que existen en el mercado, en ese sentido coincidimos con Loza(8) quien afirma que la rentabilidad económica es un factor clave en la construcción de nuestro prototipo, especialmente en comparación con los precios del mercado internacional. Con un costo inferior en alrededor del 50 %, nuestra alternativa ofrece una oportunidad para fomentar la innovación y fabricación de estos equipos en nuestro país, lo que podría reducir las tasas de importación de equipos altamente utilizados en laboratorios. Además, nuestro prototipo tiene una calidad óptima para el desarrollo de la docencia y utiliza los recursos y el conocimiento técnico multidisciplinario de la universidad.(8) De igual manera Mohini(3) menciona que todo el sistema fabricado es rentable y tiene la capacidad de responder inmediatamente a cualquier tipo de cambios. Así el sistema proporciona con éxito las funciones necesarias requeridas en varios laboratorios de microbiología y laboratorios farmacéuticos a un precio muy económico.
CONCLUSIONES
Se logró diseñar e implementar el dispositivo agitador orbital (orbital shaker) a bajo costo para laboratorios de cultivo vegetal, la propuesta tecnológica permite establecer una velocidad de funcionamiento comprendido entre 0 a 300rpm, cabe indicar que el movimiento recién inicia a los 80 rpm momento en el cual el motor paso a paso rompe el momento de inercia. Se diseñó un sistema de control de tipo lazo abierto utilizando el microcontrolador ATmega328P que permite la adquisición de la señal analógica que proviene de un potenciómetro (perilla) de 5KΩ. Para el control del motor se empleó un dispositivo DRV8825 el cual recibe información del microcontrolador ATmega328P y establece las revoluciones del motor paso a paso. Se recomienda emplear dos fuentes separas una para el sistema electrónico y otra para el motor nema que eviten conflictos de caídas de voltaje y corriente en el microcontrolador al momento de iniciar el movimiento. El costo del dispositivo fue USD 153.50 dólares americanos. Finalmente, se puede concluir que el dispositivo agitador orbital se implementó a bajo costo y contribuirá de manera significativa a las investigaciones que se desarrollan en laboratorios de cultivo vegetal.
REFERENCIAS BIBLIOGRÁFICAS
1. Oostrom, RD Van. Design of an orbital shaker for future laboratory use. 2023. http://essay.utwente.nl/94328/
2. Arboleda E. Design, construction, and evaluation of transformer-based orbital shaker for coffee micropropagation. Journal of Mechatronics, Electrical Power, and Vehicular Technology. 2022; 13(2), 147-156. https://doi.org/10.14203/j.mev.2022.v13.147-156
3. Mohini A. Microcontroller based orbital motion shaker, 2015 International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS), Okinawa, Japan, 2015, pp. 115-120. https://doi.org/10.1109/ICIIBMS.2015.7439504
4. Panizo D. Revisión de un prototipo de agitador electromecánico con movimiento orbital y diseño de sus mejoras. Pontificie Universidad Católica del Perú. Lima, Perú. 2011. http://hdl.handle.net/20.500.12404/812
5. Nedbal J, Gao L, Suhling K. Bottom-illuminated orbital shaker for microalgae cultivation. HardwareX. 2020; 8:e00143. https://doi.org/10.1016/j.ohx.2020.e00143.
6. Espinosa FI, Trávez GL. Diseño y construcción de un agitador orbital modular de doble bandeja para el laboratorio de cultivo de tejidos vegetales de la carrera de Ingeniería en Biotecnología. Universidad de las Fuerzas Armadas. Sangolquí, Ecuador. 2016. http://repositorio.espe.edu.ec/handle/21000/11730
7. Cisnero-Piñeiro AL, Delgado MCF, Mendoza JAR. Tendencias de la producción científica en el área Industrial and Manufacturing Engineering en Scopus entre 2017 y 2021. Data & Metadata 2022;1:6. https://doi.org/10.56294/dm20226.
8. Loza Matovelle D, Torres M, Ruilova M, Albán L, Velasco R, Segura L, Dabirian R. Diseño y Construcción del Prototipo de Código Abierto de una Incubadora con Agitación Orbital. Rev. Politéc. 2023;36(3):51.
FINANCIACIÓN
Investigación desarrollada con recursos propios de los investigadores.
CONFLICTO DE INTERESES
No existen conflictos de interés.
CONTRIBUCIÓN DE AUTORÍA
Conceptualización: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen
Curación de datos: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez
Análisis formal: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez
Adquisición de fondos: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez, José Luis Ausejo Sánchez, Algemiro Julio Muñoz Vilela, Abrahán Cesar Neri-Ayala
Investigación: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez
Metodología: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez, José Luis Ausejo Sánchez, Algemiro Julio Muñoz Vilela, Abrahán Cesar Neri-Ayala
Administración del proyecto: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez
Recursos: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez, José Luis Ausejo Sánchez, Algemiro Julio Muñoz Vilela, Abrahán Cesar Neri-Ayala
Software: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen
Supervisión: William Joel Marín Rodriguez
Validación: José Luis Ausejo Sánchez, Algemiro Julio Muñoz Vilela, Abrahán Cesar Neri-Ayala
Visualización: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez, José Luis Ausejo Sánchez, Algemiro Julio Muñoz Vilela, Abrahán Cesar Neri-Ayala
Redacción – borrador original: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez
Redacción – revisión y edición: Ernesto Díaz Ronceros, Ángel David Hernández-Amasifuen, William Joel Marín Rodriguez